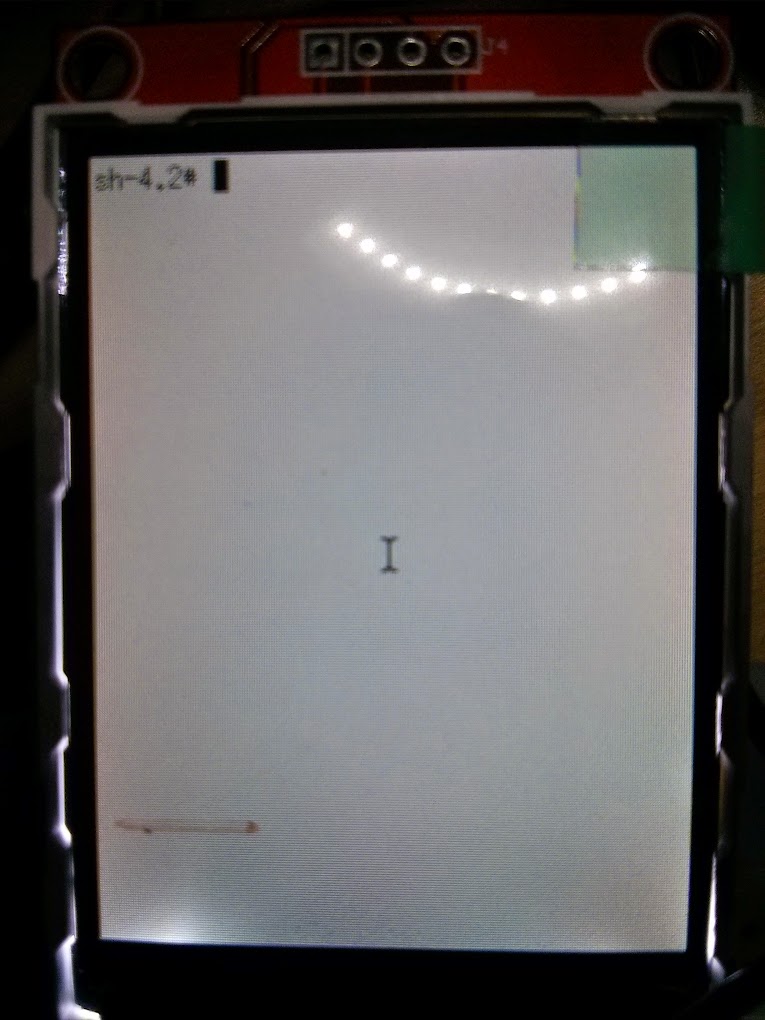
2.2" TFT display on Beaglebone I recently bought a 2.2" TFT display on Ebay (come on, 7 bucks...) and was up to use it with my BeagleBone. Luckily for me there was no Linux driver for the ILI9341 controller so it's just to roll up my sleeves and get to work. Boot up the BeagleBone I haven't booted up my bone for a while and support for the board seems